加速光线追踪算法优化
在上一篇文章中,我们学习了光线追踪的基本原理:向场景发射光线,并计算它与物体是否相交。听起来很简单,对吧?
但这里隐藏着一个巨大的性能陷阱:假设你的场景中有 1000 万个三角形,需要渲染 1920×1080 分辨率的图像。
- 朴素做法:每条光线都与这 1000 万个三角形逐一进行求交测试
- 时间复杂度:O(像素数 × 三角形数) ≈ 2M × 10M = 20 万亿次计算
- 实际后果:渲染一帧可能需要几天甚至几周
本文基于 GAMES101 Lecture 14 的内容,介绍三种主流的光线追踪加速结构,帮助你理解现代渲染器如何将渲染时间从几天缩短到几秒。
核心思想:如果光线连物体所在的区域都没碰到,那就不需要测试区域内的物体。
一、均匀网格(Uniform Grids)
1.1 基本思想
将整个场景像切蛋糕一样,划分成大小均匀的网格(Voxels),每个格子记录其中包含的物体。
1.2 工作流程
预处理阶段:
- 计算包围整个场景的轴对齐包围盒(AABB)
- 将包围盒均匀划分为 nx × ny × nz 个网格单元
- 遍历所有物体,将其注册到与之相交的所有网格中
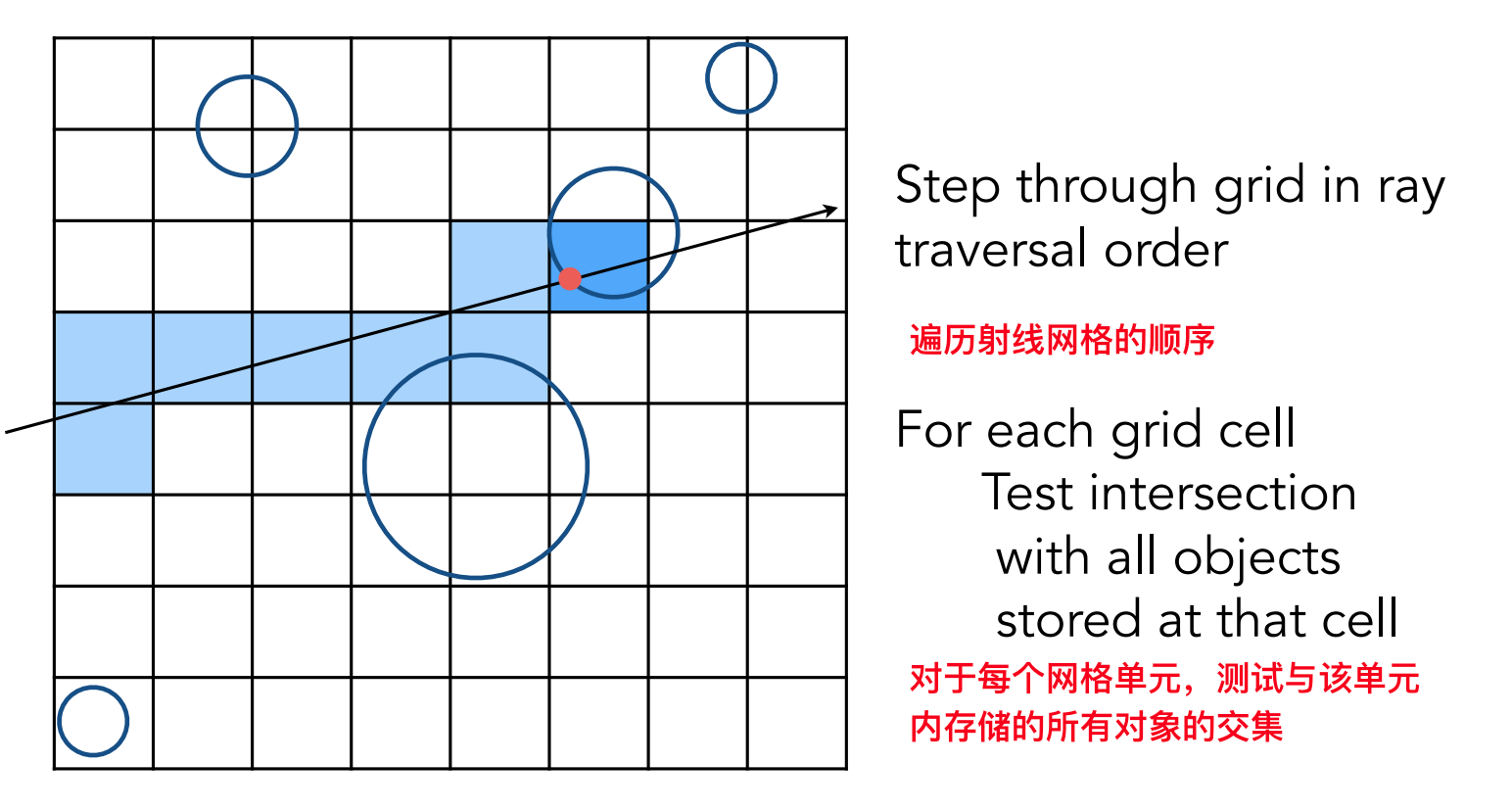
光线遍历阶段:
- 光线从起点开始,按照 3D-DDA 算法逐格前进
- 每进入一个网格,检查该格是否包含物体
- 如果包含,则与格内所有物体进行精确求交测试
- 找到最近交点后终止遍历
def traverse_grid(ray, grid):
"""3D-DDA 光线网格遍历"""
current_cell = get_entry_cell(ray)
while current_cell in grid:
if grid[current_cell].has_objects():
hit = intersect_objects(ray, grid[current_cell].objects)
if hit:
return hit
current_cell = next_cell(ray, current_cell) # 移动到下一个格子
return None
1.3 优缺点分析
优点:
- 实现简单,易于理解
- 当物体均匀分布时(如粒子系统、体积数据),性能优秀
- 网格访问为 O(1),空间划分规则
缺点:
- “体育场里的茶壶”(Teapot in a Stadium)问题
- 场景:巨大的空旷体育场中心放一个小茶壶
- 困境:为了精细表示茶壶需要细分网格 → 光线要遍历成千上万个空格子 → 性能崩溃
- 根本原因:无法适应物体分布不均匀的场景
二、空间划分:KD-Tree
2.1 设计动机
为了解决均匀网格的"体育场茶壶"问题,自适应空间划分方法应运而生:
- 核心思想:根据物体密度动态调整空间划分粒度
- 策略:物体密集区域细分,空旷区域保持大块
2.2 KD-Tree 原理
KD-Tree(K-Dimensional Tree)是一种二叉空间划分树:
构建过程:
- 选择一个坐标轴(x/y/z 循环选择)和分割位置
- 沿该轴将空间一分为二
- 对左右子空间递归执行 1-2 步
- 当节点内物体数量 ≤ 阈值时停止分割
节点结构:
class KDNode:
# 内部节点
axis: int # 分割轴 (0=x, 1=y, 2=z)
split_pos: float # 分割位置
left: KDNode # 左子树
right: KDNode # 右子树
# 叶子节点
objects: List # 物体列表
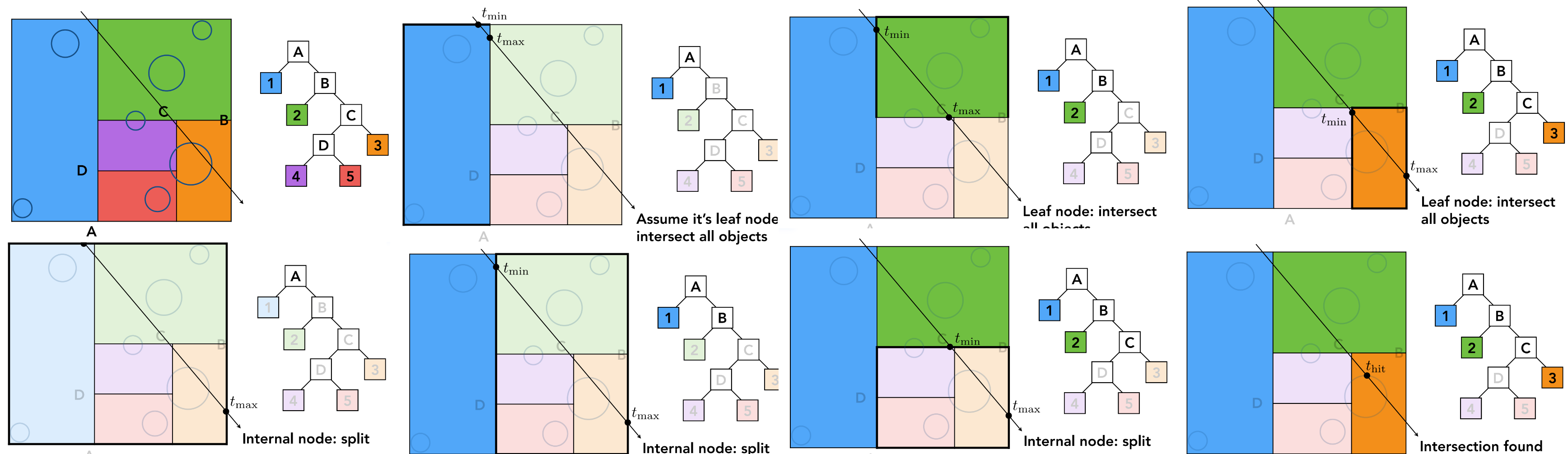
2.3 光线遍历算法
def traverse_kdtree(ray, node):
"""递归遍历 KD-Tree"""
if node.is_leaf():
return intersect_objects(ray, node.objects)
# 判断光线在分割平面的哪一侧
if ray.origin[node.axis] < node.split_pos:
near, far = node.left, node.right
else:
near, far = node.right, node.left
# 先查近端
hit = traverse_kdtree(ray, near)
if hit:
return hit
# 如果光线穿过分割平面,查远端
if ray_crosses_split_plane(ray, node):
return traverse_kdtree(ray, far)
return None
2.4 致命缺陷
物体重复存储问题: 虽然 KD-Tree 很好地解决了空间分布不均的问题,但它有两个明显的缺点,导致现代光线追踪(尤其是动态场景)较少使用它。 构建困难:很难确定一个完美的划分位置,且一旦物体移动(动态场景),整棵树很难高效更新。
后果:
- 内存占用增加(最坏情况指数级膨胀)
- 同一物体可能被多次求交
- 维护复杂度高
现状:由于这个缺陷,KD-Tree 在光线追踪领域已被 BVH 取代。
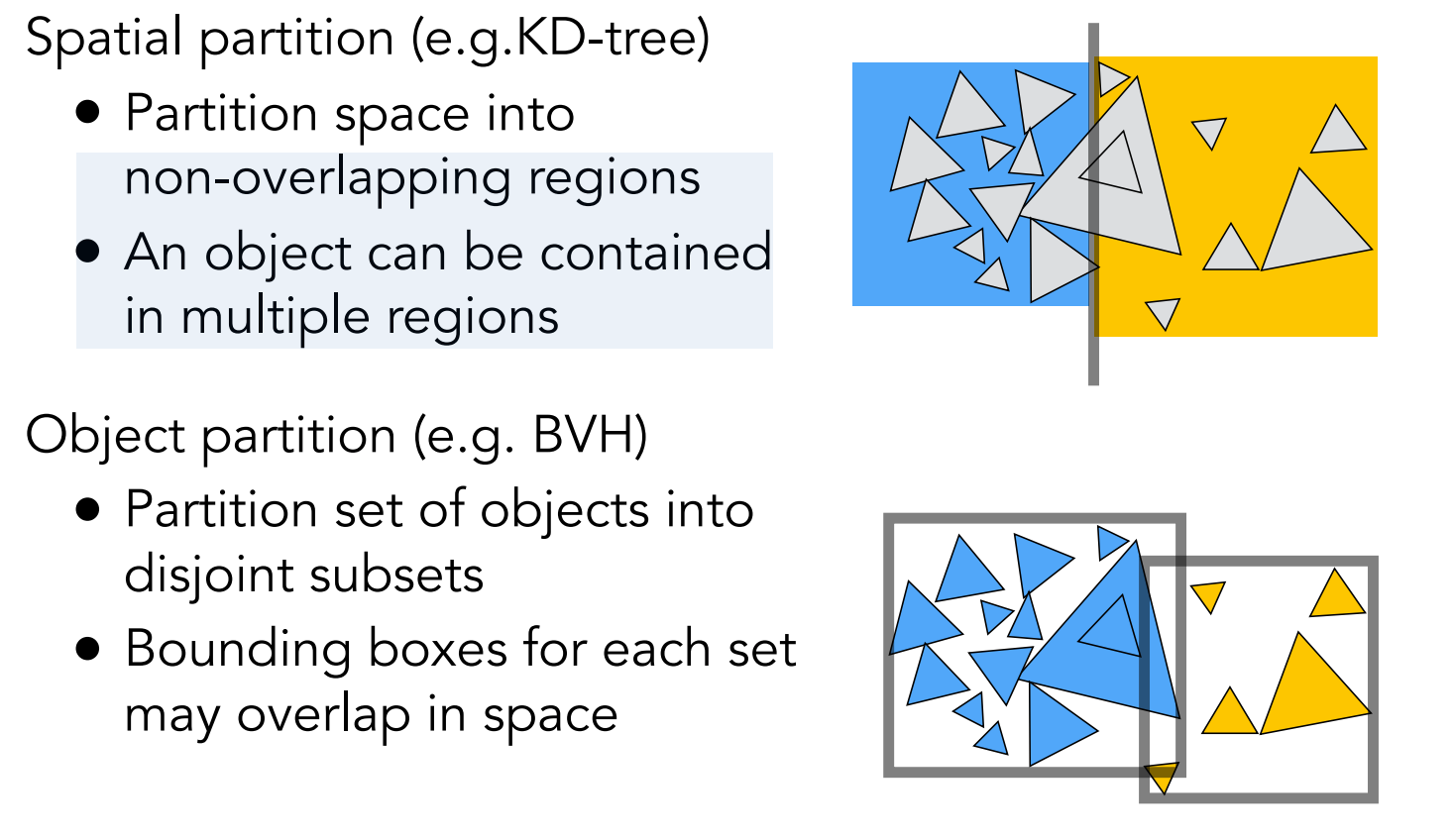
三、物体划分:BVH(工业界首选)
3.1 设计思想的根本转变
为了解决 KD-Tree 的物体重复存储问题,BVH(Bounding Volume Hierarchy,层次包围盒)采用了完全不同的策略:
| 维度 | KD-Tree | BVH |
|---|---|---|
| 划分对象 | 空间 | 物体 |
| 策略 | 沿坐标轴切割空间 | 将物体分组打包 |
| 节点内容 | 空间区域 | 物体集合的包围盒 |
| 物体归属 | 可能属于多个节点 | 仅属于一个节点 |
| 包围盒关系 | 严格不相交 | 可能重叠 |
核心优势:每个物体只出现在一个叶子节点中,彻底避免了重复存储。
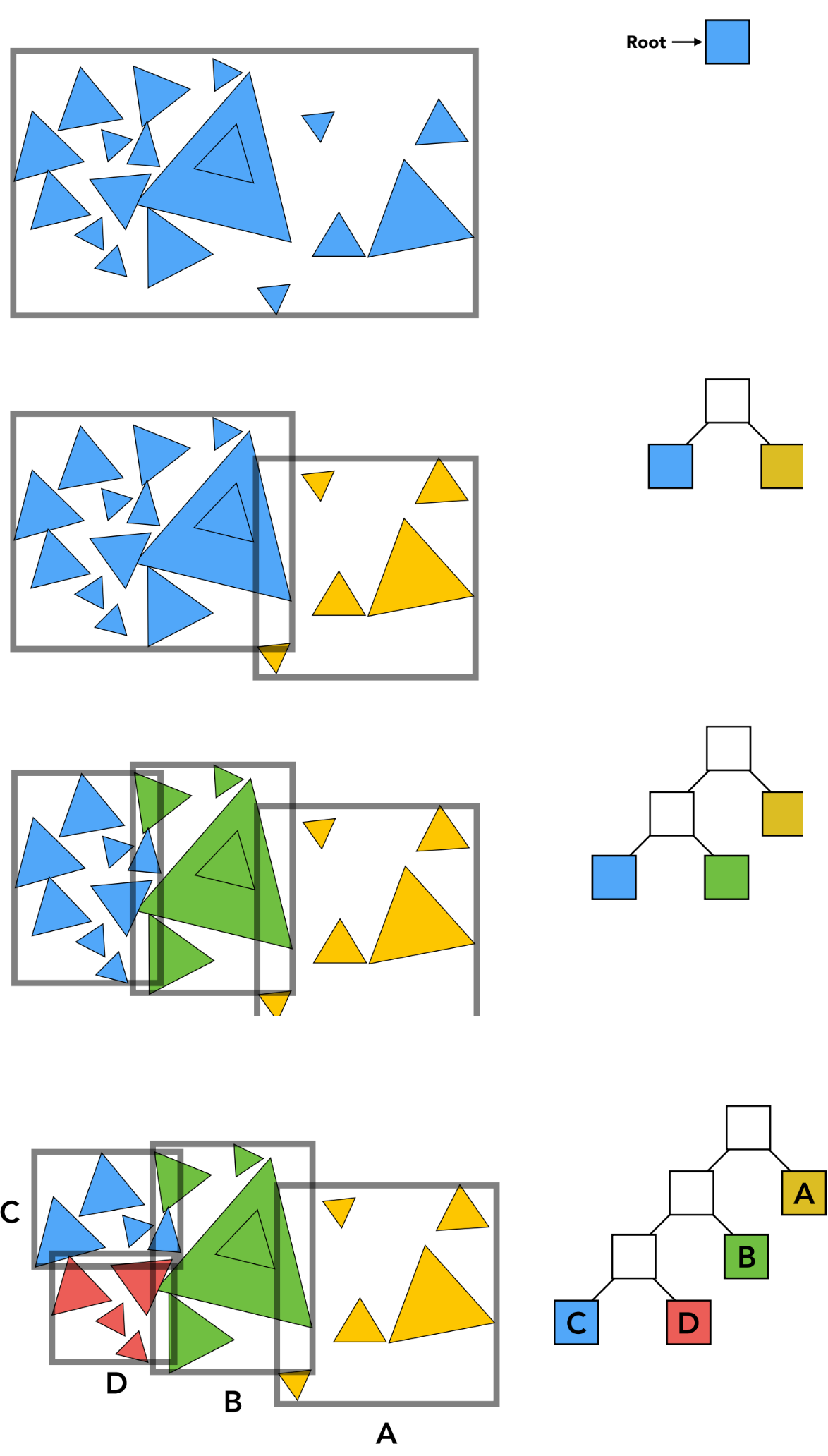
3.2 BVH 构建算法
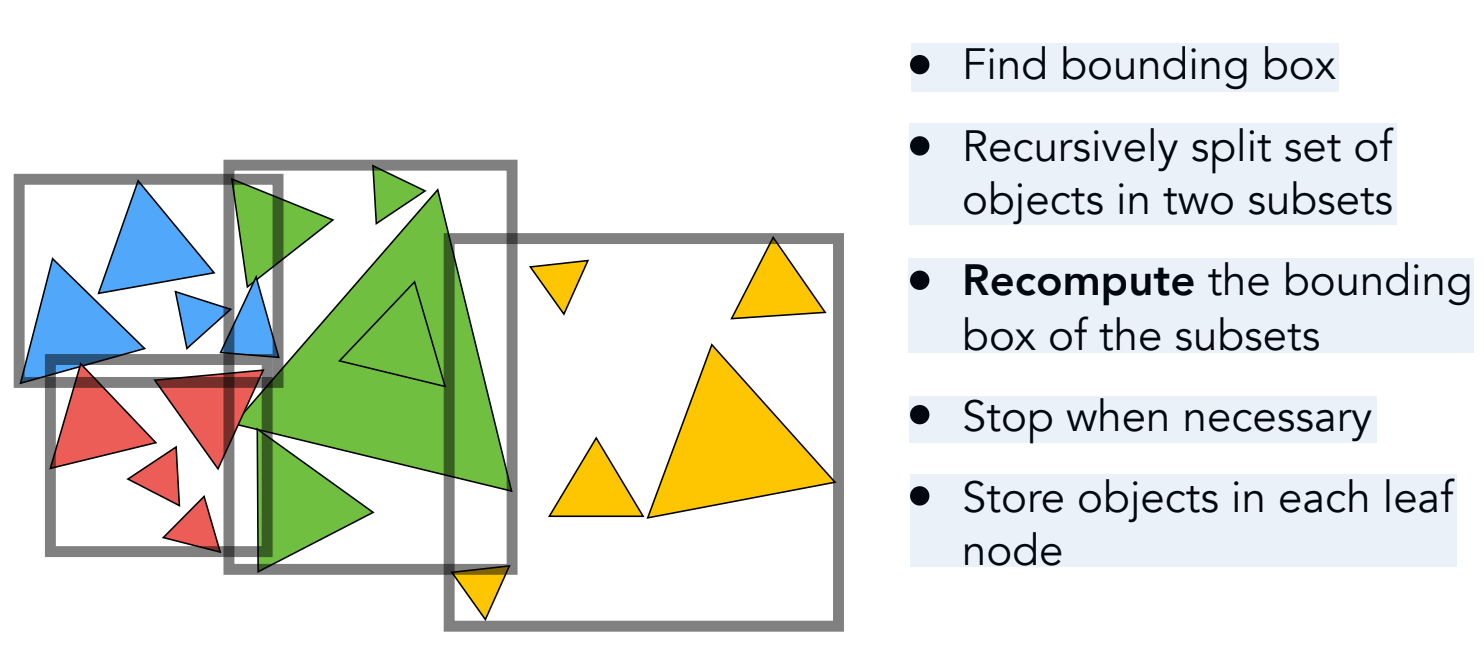
递归构建流程
def build_bvh(objects, max_leaf_size=5):
"""
递归构建 BVH
Args:
objects: 物体列表
max_leaf_size: 叶子节点最大物体数量
Returns:
BVHNode: BVH 树的根节点
"""
node = BVHNode()
# 1. 计算包围所有物体的 AABB
node.bbox = compute_bounding_box(objects)
# 2. 停止条件:物体数量足够少
if len(objects) <= max_leaf_size:
node.objects = objects
return node
# 3. 选择分割轴和分割点
axis, split_pos = choose_split(objects)
# 4. 将物体分成两组
left_objects = [obj for obj in objects if obj.centroid[axis] < split_pos]
right_objects = [obj for obj in objects if obj.centroid[axis] >= split_pos]
# 5. 递归构建左右子树
node.left = build_bvh(left_objects, max_leaf_size)
node.right = build_bvh(right_objects, max_leaf_size)
return node
分割策略
1. SAH (Surface Area Heuristic) - 表面积启发式
SAH 是最常用的分割策略,其核心思想是:
$$ \text{Cost} = C_{\text{trav}} + \frac{S_L}{S_P} \cdot N_L \cdot C_{\text{isect}} + \frac{S_R}{S_P} \cdot N_R \cdot C_{\text{isect}} $$
其中:
- $C_{\text{trav}}$:遍历节点的代价
- $S_P, S_L, S_R$:父节点、左子节点、右子节点的表面积
- $N_L, N_R$:左右子节点包含的物体数量
- $C_{\text{isect}}$:求交测试的代价
物理意义:包围盒表面积越大,光线击中的概率越高。
2. 中位数分割
更简单但次优的方法:
- 选择物体重心跨度最大的轴
- 按该轴坐标排序,从中位数处分割
def choose_split_median(objects):
"""中位数分割策略"""
# 计算每个轴的跨度
centroids = [obj.centroid for obj in objects]
extents = [max(c[i] for c in centroids) - min(c[i] for c in centroids)
for i in range(3)]
# 选择跨度最大的轴
axis = extents.index(max(extents))
# 按该轴排序,取中位数
sorted_objects = sorted(objects, key=lambda obj: obj.centroid[axis])
split_pos = sorted_objects[len(objects) // 2].centroid[axis]
return axis, split_pos
3.3 光线遍历算法
BVH 的遍历是一个递归过程,采用深度优先搜索:
def intersect_bvh(ray, node, t_min=0.0, t_max=float('inf')):
"""
光线与 BVH 求交
Returns:
hit_record: 最近的交点信息,若无交点则返回 None
"""
# 1. 包围盒测试:光线是否击中该节点的包围盒
if not ray_box_intersect(ray, node.bbox, t_min, t_max):
return None
# 2. 叶子节点:与其中所有物体求交
if node.is_leaf():
closest_hit = None
closest_t = t_max
for obj in node.objects:
hit = ray_object_intersect(ray, obj)
if hit and t_min < hit.t < closest_t:
closest_hit = hit
closest_t = hit.t
return closest_hit
# 3. 内部节点:递归遍历左右子树
hit_left = intersect_bvh(ray, node.left, t_min, t_max)
hit_right = intersect_bvh(ray, node.right, t_min, t_max)
# 4. 返回最近的交点
if hit_left and hit_right:
return hit_left if hit_left.t < hit_right.t else hit_right
elif hit_left:
return hit_left
else:
return hit_right
优化技巧:
- 提前终止:找到左子树交点后,可以用该距离更新
t_max,提前剪枝右子树 - 排序遍历:优先访问距离光线起点更近的子节点
3.4 光线-AABB 求交算法
BVH 的高效依赖于快速的包围盒求交测试:
def ray_box_intersect(ray, bbox, t_min, t_max):
"""
光线与 AABB 求交(Slab 方法)
Args:
ray: 光线 (origin, direction)
bbox: 包围盒 (min_point, max_point)
t_min, t_max: 有效距离范围
Returns:
bool: 是否相交
"""
for axis in range(3):
# 计算光线进入/离开该轴的 slab 的时间
inv_d = 1.0 / ray.direction[axis]
t0 = (bbox.min[axis] - ray.origin[axis]) * inv_d
t1 = (bbox.max[axis] - ray.origin[axis]) * inv_d
# 处理负方向
if inv_d < 0:
t0, t1 = t1, t0
# 更新有效区间
t_min = max(t_min, t0)
t_max = min(t_max, t1)
# 无交集
if t_max < t_min:
return False
return True
Slab 方法原理:
AABB 可以看作三对垂直于坐标轴的平面(slabs)的交集。光线与盒子相交,当且仅当它与所有三对平面的交集非空。
3.5 BVH 的优势与代价
优势:
- 无重复存储:每个物体仅存储一次,内存效率高
- 构建速度快:O(N log N),远快于 KD-Tree 的 O(N log² N)
- 动态场景友好:物体移动时只需更新包围盒,无需重建整棵树
- 硬件加速支持:现代 GPU(RTX 系列)直接在硬件层面支持 BVH
代价:
- 包围盒重叠:兄弟节点的包围盒可能重叠,导致光线需要同时遍历两个子树
- 包围盒冗余:物体分布稀疏时,包围盒可能包含大量空白空间
实际表现:
- 对于典型场景,BVH 比朴素求交快 100-1000 倍
- 渲染 1000 万三角形的场景,从数天降低到数秒
四、三种加速结构对比总结
4.1 综合对比表
| 维度 | 均匀网格 | KD-Tree | BVH |
|---|---|---|---|
| 划分方式 | 固定尺寸网格 | 自适应空间二分 | 物体层次分组 |
| 时间复杂度(构建) | O(N) | O(N log² N) | O(N log N) |
| 时间复杂度(查询) | O(N) 最坏 | O(log N) 平均 | O(log N) 平均 |
| 空间复杂度 | O(N + 网格数) | O(N × 重复因子) | O(N) |
| 物体重复存储 | 是 | 是(严重) | 否 |
| 包围盒重叠 | 否 | 否 | 是(可接受) |
| 适用场景 | 均匀分布场景 | 空间静态、物体简单 | 通用场景 |
| 动态场景支持 | 差 | 差(需重建) | 好(局部更新) |
| 硬件加速 | 无 | 无 | RTX GPU 原生支持 |
| 工业应用 | 体素渲染、粒子系统 | 早期学术研究 | 主流渲染器首选 |
4.2 选择建议
使用均匀网格:
- 物体均匀分布(如体素化医学数据、流体模拟)
- 场景尺寸已知且物体密度恒定
- 实现简单优先
使用 KD-Tree:
- 目前几乎不推荐用于光线追踪
- 仅在某些点云搜索、最近邻查询场景下使用
使用 BVH(推荐):
- 三角网格模型渲染
- 复杂场景(物体分布不均)
- 动态场景(变形、动画)
- 需要硬件加速(GPU)
- 生产环境渲染器
4.3 现代渲染器的实际选择
电影级渲染器:
- Pixar RenderMan: BVH
- Arnold Renderer: BVH
- V-Ray: BVH
- Cycles (Blender): BVH
实时光线追踪:
- NVIDIA OptiX: BVH(硬件加速)
- DirectX Raytracing (DXR): BVH
- Vulkan Ray Tracing: BVH
结论:对于初学者和实际应用,深入理解 BVH 的构建和遍历是最重要的,因为它是现代光线追踪的绝对基石。
五、实践:简易 BVH 实现
下面是一个简化的 BVH 实现示例,帮助理解核心概念:
from dataclasses import dataclass
from typing import List, Optional
import math
@dataclass
class AABB:
"""轴对齐包围盒"""
min: Vec3
max: Vec3
def union(self, other: 'AABB') -> 'AABB':
"""合并两个包围盒"""
return AABB(
min=Vec3(
min(self.min.x, other.min.x),
min(self.min.y, other.min.y),
min(self.min.z, other.min.z)
),
max=Vec3(
max(self.max.x, other.max.x),
max(self.max.y, other.max.y),
max(self.max.z, other.max.z)
)
)
def surface_area(self) -> float:
"""计算表面积"""
d = self.max - self.min
return 2.0 * (d.x * d.y + d.y * d.z + d.z * d.x)
class BVHNode:
"""BVH 节点"""
def __init__(self):
self.bbox: Optional[AABB] = None
self.left: Optional[BVHNode] = None
self.right: Optional[BVHNode] = None
self.objects: List = []
def is_leaf(self) -> bool:
return len(self.objects) > 0
def build_bvh(objects: List, max_leaf_size=4) -> BVHNode:
"""构建 BVH"""
node = BVHNode()
# 计算包围盒
node.bbox = objects[0].bbox
for obj in objects[1:]:
node.bbox = node.bbox.union(obj.bbox)
# 叶子节点
if len(objects) <= max_leaf_size:
node.objects = objects
return node
# 选择分割轴(最长轴)
extents = node.bbox.max - node.bbox.min
axis = 0 if extents.x > extents.y and extents.x > extents.z else \
1 if extents.y > extents.z else 2
# 按重心排序
objects.sort(key=lambda obj: obj.centroid()[axis])
mid = len(objects) // 2
# 递归构建
node.left = build_bvh(objects[:mid], max_leaf_size)
node.right = build_bvh(objects[mid:], max_leaf_size)
return node
def intersect_bvh(ray, node, t_min=0.0, t_max=float('inf')):
"""光线与 BVH 求交"""
# 包围盒测试
if not ray_box_intersect(ray, node.bbox, t_min, t_max):
return None
# 叶子节点
if node.is_leaf():
closest_hit = None
for obj in node.objects:
hit = obj.intersect(ray, t_min, t_max)
if hit:
closest_hit = hit
t_max = hit.t # 提前剪枝
return closest_hit
# 递归遍历
hit_left = intersect_bvh(ray, node.left, t_min, t_max)
if hit_left:
t_max = hit_left.t
hit_right = intersect_bvh(ray, node.right, t_min, t_max)
return hit_right if hit_right else hit_left
参考资料
- GAMES101: 现代计算机图形学入门 - 闫令琪 Lecture 14
- TinyRaytracer - Dmitry V. Sokolov
- Physically Based Rendering - Matt Pharr et al.
- NVIDIA OptiX Programming Guide - BVH 硬件加速
- Wald, I. (2007). “On fast Construction of SAH-based Bounding Volume Hierarchies”