重新认识HashMap
HashMap是Java程序员使用频率最高的用于键值对处理的数据结构。随着JDK版本的更新,JDK1.8对HashMap底层的实现进行了优化,例如引入红黑树的数据结构和扩容的优化等。本文结合JDK1.7和JDK1.8的区别,深入探讨HashMap的结构实现和功能原理。
HashMap是Java程序员使用频率最高的用于键值对处理的数据结构。随着JDK版本的更新,JDK1.8对HashMap底层的实现进行了优化,例如引入红黑树的数据结构和扩容的优化等。本文结合JDK1.7和JDK1.8的区别,深入探讨HashMap的结构实现和功能原理。
先上一段看来比较正常的代码:
1#include <stdio.h>
2#include <stdlib.h>
3
4int main(void){
5 printf("Tim\n");
6 int a = 10;
7 printf("a = %d\n",a);
8 system("pause");
9 return 0;
10}
由于我的环境是VisualStudio2013,所以上述程序可以完美执行,并且是编译0警告通过,但是在VisualStudio2008的环境下这样写是完全错误的,C89规定,在任何执行语句之前,在块的开头声明所有局部变量。但是在C99以及C++中则没有这个限制,即在首次使用之前,可在块的任何位置都可以声明变量。例如下面的写法对于C89标准才是正确的:
要了解进程的概念得先从计算机的体系结构说起,首先了解一些世界上用得最多的计算机体系结构:冯·诺依曼结构(还有其他的计算机体系结构:如哈佛结构)
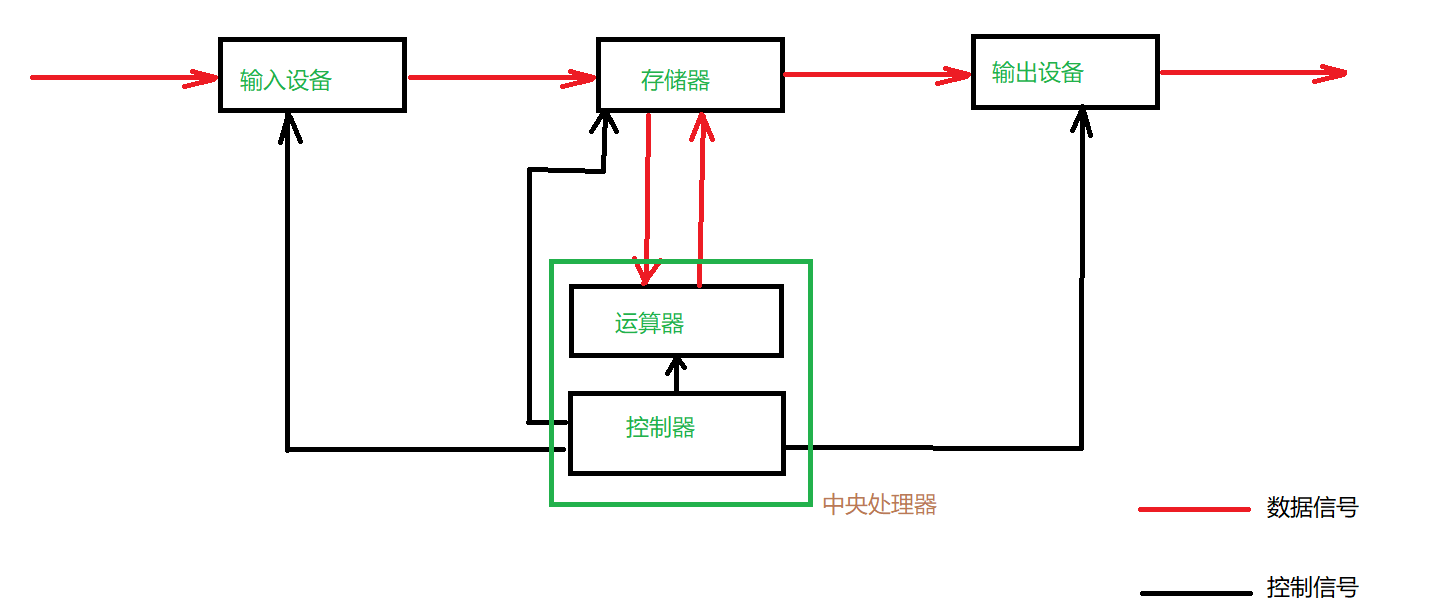
冯·诺曼结构处理器具有以下几个特点:必须有一个存储器;必须有一个控制器;必须有一个运算器,用于完成算术运算和逻辑运算;必须有输入和输出设备,用于进行人机通信
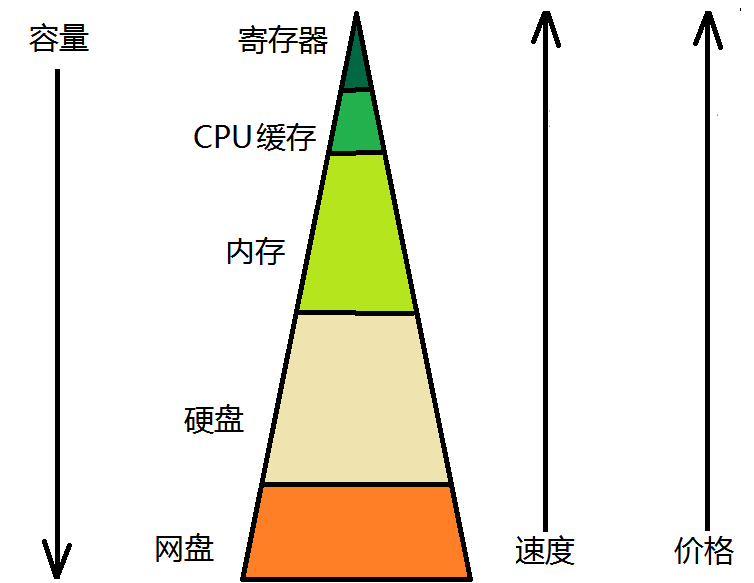
上图从容量、传输速度、价格上来作比较,可以看出来为什么我们平时见到的计算机为什么硬盘几百G甚至几个T,而内存却只有8G或者16G,内存的IO速度是非常快的,跟硬盘的IO速度是 数量级 的差距,和内存相比寄存器就更快了,也是数量级的差距,于是出现了缓存,现在(2018/09/27)都是三级缓存,也就几M的大小,每次CPU在执行一些指令的时候会将需要的数据放在缓存中,其实就相当于是一个过渡元件!
1//方式一
2Scalar intensity = img.at<uchar>(y, x);
3//方式二
4Scalar intensity = img.at<uchar>(Point(x, y));
1//读取整形
2Vec3b intensity = src.at<Vec3b>(x, y);
3int b = intensity [0];
4int g = intensity [1];
5int r = intensity [2];
6//读取浮点型
7Vec3f intensity = img.at<Vec3f>(y, x);
8float blue = intensity.val[0];
9float green = intensity.val[1];
10float red = intensity.val[2];
src.convertTo(dst, CV_32F);OpenCV是计算机视觉开源库,主要算法涉及图像处理和机器学习相关方法。是Intel公司贡献出来的,俄罗斯工程师贡献大部分C/C++代码。官网:https://opencv.org/ 从这里 https://opencv.org/releases.html 你可以下载到自己想要的版本!